AutoNAV10 robot
Autonomous shuttle for closed sites
Découvrez la nouvelle génération du robot KOMPAÏ Assist
Request a demo
The AutoNAV 10 autonomous logistics robot is an autonomous shuttle for closed sites, capable of carrying 10 passengers. The shuttle follows a defined route and can reach a maximum speed of 50km/h. It has a turning radius of just 3.4m and a range of several hours.
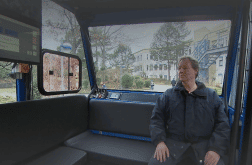
AutoNAV 10 is comfortable with its oleo-pneumatic suspension
suspension, interior ventilation and a smooth ride.
interior ventilation and a smooth ride. What's more, all the
all the safety features on board.
Feature details
Applications
> Passenger shuttle for :
- tourist areas
- large industrial sites
- Zoo and parks
> City shuttle
> Robotics research and development
Features
> Autonomous navigation
> Up to 8 hours autonomy
> Obstacle detection and avoidance
> Laser guidance
> CE Machine Directive certified
Technical specifications
General
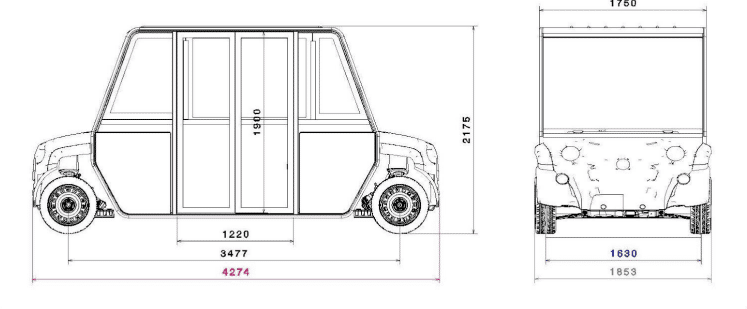
Dimensions 4.3m x 1.9m x 2.2m (L x W x H)
Total weight 1500 kg
Passenger capacity 10 passengers: 6 seated + 4 standing
Steering axles Front and rear
Maximum gradient: 10%.
Maximum speed: 50 km/h (flat surface)
Nominal acceleration: 0.46m/s2, maximum 1m/s2. These parameters are configurable.
Autonomy Over 4 hours (depending on usage scenarios)
4-wheel drive (15 kW per axle) with front and rear mechanical differentials
Wheel dimensions 16 inches
Turning radius 3.4m (double steering axle) and 7m (single steering axle)
Oleopneumatic suspension
Laser & GPS RTK guidance sensor
Redundant safety Front and rear safety sensors
73.6V, 200Ah, 14.70kW LiFePo4 batteries
Power supply 12/24/48 V DC (depending on option)
Full recharge time 8 hours
Access doors Motorised sliding doors
Interior safety equipment Seat belts and grab handles
Interior layout 3 rows of seats and interior ventilation
Signalling equipment White/red headlights/regulation flashers at front and rear
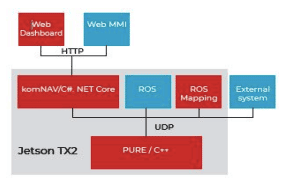
Software and HMI
Main controller Emtrion i.MX53x controller card with PURE low-level supervision
Nvidia Jetson tx2 card with komNAV navigation supervisor (optional)
Interface To be defined as required
Other
Operating conditions -10°C / +50°C
CE certification, MACHINE DIRECTIVE 2006/42/EC

OUR videos
kkom4WD relies on our 4 open PURE firmwares: low-level, control-command, sensors, security...
komNAV: includes navigation, trajectory generation and tracking, obstacle avoidance.
ROS: interconnection node with the environment.
UX: web applications for robot control and user interfaces.
R&D: 3 ways to develop your own software:
Enhance the existing ROS node and develop a new one using the komNAV and PURE access API.
Install a system (on a computer or external PC) using UDP communication with the low-level firmware.
Set up an external system (PC or tablet) using the HTTP API to interface with komNAV, where low-level functions are also exposed.